Math Matrix Functions
mat4 cubeTransform(int face)
Returns cube viewing matrix for the given cube face.Arguments
- int face - Cube face number.
Return value
Cube viewing matrix.mat4 frustum(float left, float right, float bottom, float top, float znear, float zfar)
Returns perspective projection matrix:| 2.0 * znear / (right - left) | 0.0 | (right + left) / (right - left) | 0.0 |
| 0.0 | 2.0 * znear / (top - bottom) | (top + bottom) / (top - bottom) | 0.0 |
| 0.0 | 0.0 | -(zfar + znear) / (zfar - znear) | -2.0 * zfar * znear / (zfar - znear) |
| 0.0 | 0.0 | -1.0 | 0.0 |
Coordinates of top, left, right, bottom are set relatively to center point of the znear plane.
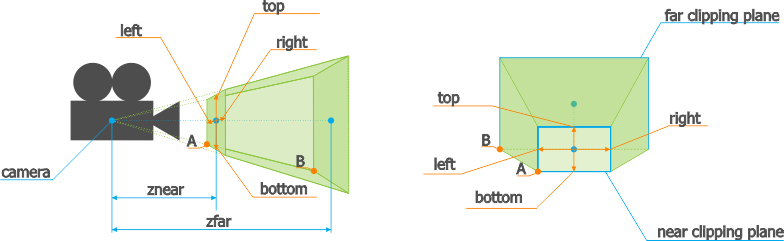
There are two different points (A and B) on the picture above. Since the top, left, right, bottom are coordinates relatively to the center point of the znear plane, coordinates of the A point should be A(left, bottom, znear). Coordinates of the B point are B(k * left, k * bottom, zfar), where k = zfar/znear.
Arguments
- float left - Left coordinate of the near clipping plane relatively to the center.
- float right - Right coordinate of the near clipping plane relatively to the center.
- float bottom - Bottom coordinate of the near clipping plane relatively to the center.
- float top - Top coordinate of the near clipping plane relatively to the center.
- float znear - Distance to the near depth clipping plane.
- float zfar - Distance to the farther depth clipping plane.
Return value
Perspective projection matrix.mat4 inverse4(const mat4 & m)
Return inverse of 3x4 matrix.Arguments
- const mat4 & m - The value of the matrix.
Return value
The resulting matrix.dmat4 inverse(const dmat4 & m)
Return inverse matrix.Arguments
- const dmat4 & m - The value of the first matrix.
Return value
The resulting matrix.mat4 inverse(const mat4 & m)
Return inverse of 4x4 matrix.Arguments
- const mat4 & m - The value of the matrix.
Return value
The resulting matrix.mat4 lookAt(const vec3 & position, const vec3 & direction, const vec3 & up)
Return viewing matrix.Arguments
- const vec3 & position - Position coordinates of the target point.
- const vec3 & direction - Direction of the vector.
- const vec3 & up - Direction of the up vector.
Return value
The viewing matrix.dmat4 lookAt(const dvec3 & position, const dvec3 & direction, const vec3 & up)
Return viewing matrix.Arguments
- const dvec3 & position - Position coordinates of the target point.
- const dvec3 & direction - Direction of the vector.
- const vec3 & up - Direction of the up vector.
Return value
The viewing matrix.mat4 obliqueProjection(const mat4 & projection, const vec4 & plane)
Return oblique projection matrix.Arguments
- const mat4 & projection - Projection matrix.
- const vec4 & plane - Clipping plane.
Return value
The oblique projection matrix.quat orthoTangent(const vec4 & tangent, const vec3 & normal)
Creates the ortho triangle tangent space basis.Arguments
- const vec4 & tangent - Tangent vector.
- const vec3 & normal - Normal vector.
Return value
The tangent basis.quat orthoTangent(const vec3 & tangent, const vec3 & binormal, const vec3 & normal)
Creates the ortho triangle tangent space basis.Arguments
- const vec3 & tangent - Tangent vector.
- const vec3 & binormal - Binormal vector.
- const vec3 & normal - Normal vector.
Return value
The tangent basis.mat4 perspective(float fov, float aspect, float znear, float zfar)
Returns perspective projection matrix.Arguments
- float fov - Field of view angle.
- float aspect - Aspect ratio. The aspect ratio is the ratio of width to height.
- float znear - Nearest depth clipping plane.
- float zfar - Farther depth clipping plane.
Return value
Perspective projection matrix.mat4 reflect(const vec4 & plane)
Return reflection matrix.Arguments
- const vec4 & plane - Reflection plane.
Return value
The reflection matrix.dmat4 reflect(const dvec4 & plane)
Return reflection matrix.Arguments
- const dvec4 & plane - Reflection plane.
Return value
The reflection matrix.mat4 rotateX(float angle)
Returns matrix of rotation at the given angle around X axis:| 1.0 | 0.0 | 0.0 | 0.0 |
| 0.0 | cos | -sin | 0.0 |
| 0.0 | sin | cos | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float angle - Rotation angle, degrees.
Return value
Rotation matrix.dmat4 rotateX(double angle)
Return X rotation matrix.Arguments
- double angle - Rotation angle (in degrees).
Return value
The resulting matrix.mat4 rotateY(float angle)
Returns matrix of rotation at the given angle around Y axis:| cos | 0.0 | sin | 0.0 |
| 0.0 | 1.0 | 0.0 | 0.0 |
| -sin | 0.0 | cos | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float angle - Rotation angle, degrees.
Return value
Rotation matrix.dmat4 rotateY(double angle)
Return Y rotation matrix.Arguments
- double angle - Rotation angle (in degrees).
Return value
The resulting matrix.mat4 rotateZ(float angle)
Returns matrix of rotation at the given angle around Z axis:| cos | -sin | 0.0 | 0.0 |
| sin | cos | 0.0 | 0.0 |
| 0.0 | 0.0 | 1.0 | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float angle - Rotation angle, degrees.
Return value
Rotation matrix.dmat4 rotateZ(double angle)
Return Z rotation matrix.Arguments
- double angle - Rotation angle (in degrees).
Return value
The resulting matrix.mat4 rotate(const vec3 & axis, float angle)
Return rotation matrix.Arguments
- const vec3 & axis - Rotation axis.
- float angle - Rotation angle (in degrees).
Return value
The resulting matrix.dmat4 rotate(const dvec3 & axis, double angle)
Return rotation matrix.Arguments
- const dvec3 & axis - Rotation axis.
- double angle - Rotation angle (in degrees).
Return value
The resulting matrix.mat4 rotation(const mat4 & m)
Return rotation matrix.Arguments
- const mat4 & m - The value of the matrix.
Return value
The resulting matrix.mat4 scale(const vec3 & v)
Return scaling matrix.Arguments
- const vec3 & v - The value of the scaling vector.
Return value
The resulting matrix.dmat4 scale(const dvec3 & v)
Return scaling matrix.Arguments
- const dvec3 & v - The value of the scaling vector.
Return value
The resulting matrix.dmat4 setTo(const dvec3 & position, const dvec3 & direction, const vec3 & up)
Return placing matrix.Arguments
- const dvec3 & position - Position coordinates of the target point.
- const dvec3 & direction - Direction of the vector.
- const vec3 & up - Direction of the up vector.
Return value
The placing matrix.mat4 setTo(const vec3 & position, const vec3 & direction, const vec3 & up)
Return placing matrix.Arguments
- const vec3 & position - Position coordinates of the target point.
- const vec3 & direction - Direction of the vector.
- const vec3 & up - Direction of the up vector.
Return value
The placing matrix.mat4 symmetryProjection(const mat4 & projection)
Return symmetry projection matrix.Arguments
- const mat4 & projection - Projection matrix.
Return value
The symmetry projection matrix.mat4 translate(const vec3 & v)
Return translation matrix.Arguments
- const vec3 & v - The value of the translation vector.
Return value
The resulting matrix.dmat4 translate(const dvec3 & v)
Return translation matrix.Arguments
- const dvec3 & v - The value of the translation vector.
Return value
The resulting matrix.mat4 transpose3(const mat4 & m)
Return transposed rotation matrix.Arguments
- const mat4 & m - The value of the matrix.
Return value
The resulting matrix.mat4 transpose(const mat4 & m)
Return transpose matrix.Arguments
- const mat4 & m - The value of the matrix.
Return value
The resulting matrix.Last update: 03.07.2017
Помогите сделать статью лучше
Была ли эта статья полезной?
(или выберите слово/фразу и нажмите Ctrl+Enter