Rigid Body
 Rigid body enables simulation of physical bodies in accordance with Rigid body dynamics. This type of body is the most commonly used and the most efficient one in terms of performance.Тело Rigid позволяет моделировать физические тела в соответствии с динамикой тела Rigid. Этот тип тела является наиболее часто используемым и наиболее эффективным с точки зрения производительности.
Rigid body enables simulation of physical bodies in accordance with Rigid body dynamics. This type of body is the most commonly used and the most efficient one in terms of performance.Тело Rigid позволяет моделировать физические тела в соответствии с динамикой тела Rigid. Этот тип тела является наиболее часто используемым и наиболее эффективным с точки зрения производительности.

See alsoДополнительная информация#
Assigning a Rigid BodyНазначение тела Rigid#
To assign the Rigid body to an object via UnigineEditor perform the following steps:Чтобы присвоить объекту тело Rigid через UnigineEditor, выполните следующие действия:
- Откройте окно World Hierarchy.
- Выберите объект, которому нужно присвоить тело Rigid.
-
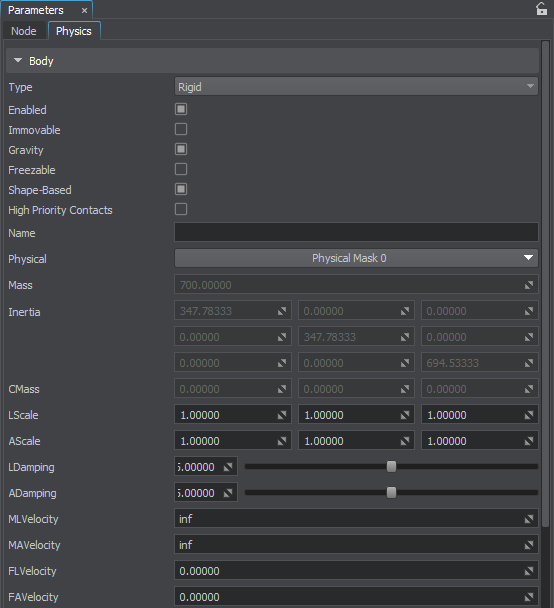
Go to the Physics tab in the Parameters window and assign a physical body to the selected object by selecting Body -> Rigid.Перейдите на вкладку Physics в окне Parameters и назначьте физическое тело выбранному объекту, выбрав Body -> Rigid.

- Set the body name and change other parameters, if necessary.Задайте название тела и при необходимости измените другие параметры.
ParametersПараметры#
The set of Rigid body parameters in accordance with Rigid body dynamics includes the following:Набор параметров тела Rigid в соответствии с динамикой тела Rigid включает следующее:
| Immovable |
|
||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Gravity | |||||||||||||||||||
| Freezable |
Примечание
This flag is recommended to be always set for all rigid bodies except for Player Actor. Freezing a player causes it to react to the user's input with a time lag, small but nonetheless perceptible.Этот флаг рекомендуется всегда устанавливать для всех твердых тел, кроме Player Actor. Застывание игрока заставляет его реагировать на ввод пользователя с задержкой по времени — небольшой, но всё же ощутимой. |
||||||||||||||||||
| Shape-Based |
Примечание
Setting the individual masses or densities of the shapes is the most intuitive method to achieve correct physical behavior of the body. Even if overridden by the body parameters, they are still used to determine the distribution of mass within the object.Установка индивидуальных масс или плотности форм — наиболее простой метод достижения правильного физического поведения тела. Даже если эти параметры будут переопределены параметрами тела, они все равно используются для распределения массы внутри объекта. |
||||||||||||||||||
| Inertia |
Примечание
To rotate the body evenly about the rotation axis, the matrix should be diagonal, i.e all values outside the main diagonal are set to 0. Otherwise, the body may start to rotate chaotically.Чтобы тело вращалось равномерно вокруг оси вращения, матрица должна быть диагональной, т.е. все значения за пределами главной диагонали должны быть установлены на 0. В противном случае тело может начать хаотично вращаться.
Different inertia tensors that override shape-based parametersРазличные тензоры инерции, которые переопределяют параметры на основе формы |
||||||||||||||||||
| CMass |
Примечание
Center of mass is set as coordinates of the point in local space of the body.Центр масс задается как координаты точки в локальном пространстве тела. |

Информация, представленная на данной странице, актуальна для версии UNIGINE 2.20 SDK.